Sydney NSW, Australia
Award-winning research
The Macquarie University Advanced Drone Systems Research Centre has generated award-winning research and patented innovations, while engaging with industry partners and obtaining multi-million dollar funding.
Our research is conducted by more than twenty interdisciplinary faculty members across:
- biology
- business
- computer science
- engineering
- law
- physics.
The centre's research falls into five main themes:
Drone autonomy
Research in this theme spans AI and ML-based autonomous drones.
Autonomous drone landing
 This project is a partnership between:
This project is a partnership between:
- ARC
- Macquarie University
- Skyynet, Inc.
One of the biggest issues facing drone delivery today is the last meter problem, namely that many challenging corner cases make it complex and difficult to reason about what is a safe landing site for a drone to deliver a package. This research will apply machine learning to train robust and intelligent algorithms to recognise using sensor data in what situations it is safe to deliver a package. Robust validation of a solution will be performed through real-world flight tests with drones.
Finding a solution to this problem will surmount a difficult technical challenge that even the top technical companies have yet to fully solve and spur Australia towards pioneering large-scale delivery of items using drones.
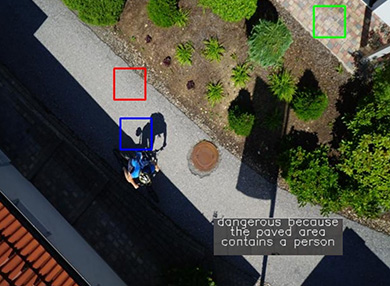
We have developed Autoland software for marker-based autonomous drone landing that uses AI and computer vision to find and verify markers laid out on the ground by humans for landing. This system has been tested for robustness to issues such as:
- shadows
- dust
- glare
- other potential sources of failure.
We have also developed a neuro-symbolic approach to the general autonomous landing problem. Without human assistance (markerless), our solution is shown to substantially outperform semantic segmentation (classic deep learning and neural network approaches) and LLM-based methods in autonomously finding safe landing sites.
Autonomous drone handoff
 This paper introduces an Emergency Battery Service (EBS) as an item handoff system for drones, where an EBS drone delivers a fresh battery to a field-deployed drone with a depleted one. The authors design a novel battery transfer mechanism and drone localisation approach using the Cross Marker Position (CMP) method. Key challenges include achieving a stable, balanced handoff and precise localisation of the receiving drone.
This paper introduces an Emergency Battery Service (EBS) as an item handoff system for drones, where an EBS drone delivers a fresh battery to a field-deployed drone with a depleted one. The authors design a novel battery transfer mechanism and drone localisation approach using the Cross Marker Position (CMP) method. Key challenges include achieving a stable, balanced handoff and precise localisation of the receiving drone.
To mitigate downwash effects due to the drones' vertical proximity, the EBS drone adopts a diagonal alignment with the receiver, reducing the gap between them to half a metre. CFD analysis reveals that diagonal alignment, rather than perpendicular, reduces turbulence, and this configuration is verified through airflow and thrust output measurements.
The CMP-based localisation method achieves positional accuracy within 90mm for the EBS drone. Experimental results demonstrate that the transfer mechanism enables a successful mid-air handoff within five seconds, with the EBS drone maintaining a half-metre vertical distance from the receiver drone, where turbulence of up to four m/s does not hinder the transfer.
- Professor Iain Collings
- Yao Deng
- Dr Yimeng Feng
- Professor Richard Han
- Professor Stephen Hanly
- Dr Hazer Inaltekin
- Alice James
- Heegyeong Kim
- Dr Endrowednes Kuantama
- Linfeng Liang
- Professor Annabelle McIver
- Professor Subhas Mukhopadhyay
- Sebastian Schroder
- Avishkar Seth
- Jiaohong Yao
- Yihao Zhang
- Dr James Zheng
- L. Liang, Y. Deng, K. Morton, V. Kallinen, A. James, A. Seth, E. Kuantama, S. Mukhopadhyay, R. Han, X. Zheng, GARL: Genetic Algorithm-Augmented Reinforcement Learning to Detect Violations in Marker-Based Auto-Landing Systems, 47th International Conference on Software Engineering (ICSE 2025).
- S. Schroder, Y. Deng, A. James, A. Seth, K. Morton, S. Mukhopadhyay, R. Han, X. Zheng, Towards Robust Autonomous Landing Systems: Iterative Solutions and Key Lessons Learned, 55th Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN 2025).
Cooperative drone swarms
Research in this theme addresses scalable distributed:
- coordination
- control
- communication.
Mid-air battery swap for drones
 Energy and in particular limited battery capacity is the largest constraint in today's drones and UAVs, limiting both flight duration and range. This project seeks to address this issue by developing an approach for mid-air exchange and replenishment of batteries.
Energy and in particular limited battery capacity is the largest constraint in today's drones and UAVs, limiting both flight duration and range. This project seeks to address this issue by developing an approach for mid-air exchange and replenishment of batteries.
Drones will rendezvous in the field, with a supply drone providing a fresh battery in mid-air to a deployed drone in the field that has a depleted battery. In exchange, the supply drone will receive via mid-air the depleted battery. This approach enables continuous replenishment of the deployed drone, without taking it away from its task in the field, while extending the deployed drone's flight time and/or range.
This work has been published as Aerobridge in ACM MobiCom 2024.
Intelligent and adaptive balanced lift via drone swarms
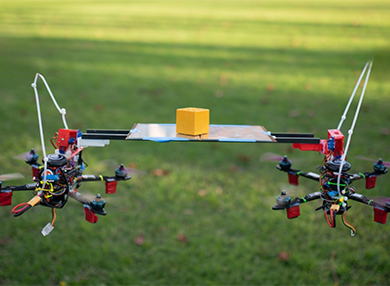 Recently, there has been increased interest in utilising cooperative drones for payload deliveries. In prior work, all of the methods we know employ a pull-based method in which the payload dangles below the drones and is pulled from above by each drone to lift the payload. This approach suffers from instability induced by downwash from the drones on the payload, causing swaying of the payload.
Recently, there has been increased interest in utilising cooperative drones for payload deliveries. In prior work, all of the methods we know employ a pull-based method in which the payload dangles below the drones and is pulled from above by each drone to lift the payload. This approach suffers from instability induced by downwash from the drones on the payload, causing swaying of the payload.
Instead, this paper explores an entirely new approach to cooperative lift in which the drones push a plate from below upon which a payload is placed, thereby avoiding downwash and swaying.
We introduce the concept of a push-based self-balancing tray (SBT) above and between a pair of drones that integrates a three-degree end effector (3-DEE) control to help balance the payload during the lift. Experimental results demonstrate that the 3-DEE system significantly reduces vibrations, maintaining object stability at 3 m/s.
Towards robust Lidar-based 3D detection and tracking of UAVs
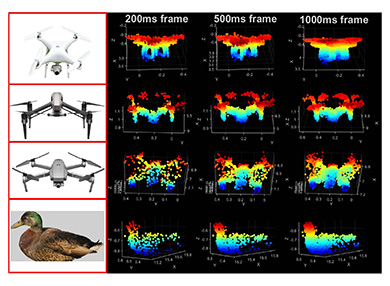 In this research, we study the robustness of lidar-based 3D detection and tracking of UAVs. We investigate the effective detection ranges of different UAVs based on their construction materials and the effective range and 3D detection performance of a specific UAV at different atmospheric visibility conditions.
In this research, we study the robustness of lidar-based 3D detection and tracking of UAVs. We investigate the effective detection ranges of different UAVs based on their construction materials and the effective range and 3D detection performance of a specific UAV at different atmospheric visibility conditions.
Further, we examine to what extent lidar-based systems can track a drone’s trajectories via real-world experiments and point cloud data processing. Using a COTS lidar-based system (Livox Mid-40), we confirm that we can track UAVs fine-grained at up to 80m distance under various environmental conditions, for example:
- morning
- afternoon
- night.
- AeroBridge: autonomous drone handoff system for emergency battery service
- Cooperative drone payload delivery with self balancing tray
- T. Abir, E. Kuantama, J. Dawes, R. Han, P. Nguyen, et al., Detection and Tracking of Drone Swarms using LiDAR, 23rd ACM International Conference on Mobile Systems, Applications, and Services (MobiSys 2025).
High performance next-generation drones
This research addresses improved aerodynamic design for:
- extended flight
- energy efficiency
- photonic integration.
 Aerodynamic efficiency
Aerodynamic efficiency
We have partnered with Seaflight to improve the aerodynamic efficiency of wing design for fixed-wing UAVs. This research will prolong flight duration and/or extend flight range, both key performance metrics for next-generation drones, especially those involved in long range flight lasting tens of hours or longer.
Advanced motor design
Motivated by the acute energy supply problem experienced by today's drones and UAVs, we have developed a new design for electric motors that is 30% more efficient than current motors used by drones. This project is integrating this new motor design into drones for further testing.
Mm-Wave communication networks in urban environments
This project is developing new architectures for next-generation mobile network deployments. A critical aspect is the use of the mm-Wave spectrum which offers ten to 100 times the bandwidth used by current mobile networks, but comes with many challenges. 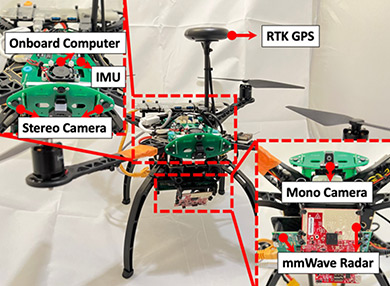 We are:
We are:
- fundamentally characterising the practical information carrying capacity of these future mm-Wave systems,
- developing radically new network designs and data transmission technologies
- unlocking the spectrum by enabling secure outdoor mobile cellular deployments with wide-spread coverage
- supporting vastly greater traffic densities and data rates.
Airborne base station communication systems
This project is fundamentally characterising and optimising information gathering, dissemination, and communication capacities of airborne base stations to enable low latency communications in rural and remote areas. New technologies such as precision farming, safe remote equipment operation in mining, and wide area surveillance and security, require low latency communications that are an order of magnitude beyond what is currently available from satellite links.
The expected outcome will be radically new base station deployment and flight path planning, and data transmission technologies. These will unlock new application technologies by enabling secure wide-spread communications coverage, delivering economic benefits to remote Australia.
Drone safety
We conduct research into robust software engineering and testing and formal method guarantees of flight safety.
Safe AI testing and verification
 In this project, we investigate novel testing techniques to find bugs in autonomous landing software, as well as verification techniques that can provide ways to reason about guarantees for autonomous navigation. We have produced and published a software engineering solution using genetic algorithms and reinforcement learning to find corner cases that cause failures in autonomous landing.
In this project, we investigate novel testing techniques to find bugs in autonomous landing software, as well as verification techniques that can provide ways to reason about guarantees for autonomous navigation. We have produced and published a software engineering solution using genetic algorithms and reinforcement learning to find corner cases that cause failures in autonomous landing.
We have designed a neuro-symbolic solution to generalised drone landing, where the benefit of neuro-symbolic approaches is that they can provide ways to reason about verification guarantees, unlike purely neural network approaches.
Radar-aided agile navigation in gps-denied environment
 Navigating in GPS-denied environments is a critical challenge for drone systems, particularly in:
Navigating in GPS-denied environments is a critical challenge for drone systems, particularly in:
- urban areas with tall buildings
- indoor spaces with complex layouts
- remote locations with weak GPS signals.
Traditional approaches rely on cameras or Light Detection and Ranging (LiDAR) sensors. However, their performance can deteriorate or even fail in challenging lighting conditions or when there are airborne obscurants like dust and fog. Our solution is to propose a novel Millimeter Wave (mmWave) radar aided drone navigation system.
This system offers robust and dependable perceptual information about the environment, particularly in scenarios with degraded visibility and harsh conditions. Notably, our proposed system enables agile navigation with high precision. Additionally, the integrated hardware is designed in a compact, cost-effective form factor, making it well-suited for drone systems.
Drone vision disruption
 This study aims to create a two-axis tracker system that can recognise drones and locate the position of the drone camera so that the laser beam can track and dazzle the drone camera. The depth camera is used to localise the part of the target and is created using the YOLOv5 algorithm as a deep learning detector model.
This study aims to create a two-axis tracker system that can recognise drones and locate the position of the drone camera so that the laser beam can track and dazzle the drone camera. The depth camera is used to localise the part of the target and is created using the YOLOv5 algorithm as a deep learning detector model.
Due to its small size, the drone camera is challenging to detect and calculate the detection range. The adaptive detection method approach combines drone detection and drone camera detection. The depth camera provides input in the form of a three-coordinate axis from the target.
Drone applications
This research addresses the application of drones in:
- multimodal marine monitoring
- surveying
- inventory monitoring.
Drone to monitor marine behaviour and habitat used of rays
 The way an animal behaves in its habitat provides insight into its ecological role. As such, collecting robust, accurate datasets in a time-efficient manner is an ever-present pressure for the field of behavioural ecology.
The way an animal behaves in its habitat provides insight into its ecological role. As such, collecting robust, accurate datasets in a time-efficient manner is an ever-present pressure for the field of behavioural ecology.
Faced with the shortcomings and physical limitations of traditional ground-based data collection techniques, particularly in marine studies, drones offer a low-cost and efficient approach for collecting data in a range of coastal environments. Despite drones being widely used to monitor a range of marine animals, they currently remain underutilised in ray research.
The innovative application of drones in environmental and ecological studies has presented novel opportunities in animal observation and habitat assessment, although this emerging field faces substantial challenges. As we consider the possibility to monitor rays using drones, we face challenges related to local aviation regulations, the weather and environment, as well as sensor and platform limitations.
Promising solutions continue to be developed, however, growing the potential for drone-based monitoring of behaviour and habitat use of rays. While the barriers to enter this field may appear daunting for researchers with little experience with drones, the technology is becoming increasingly accessible, helping ray researchers obtain a wide range of highly useful data.
Drone sensing for search and rescue in the wild
Search and rescue operations in challenging environments demand efficient and robust technologies for detecting vital signs of individuals. Drone sensing system can enable a fast response, searching and monitoring individuals using remote sensing capabilities, and providing valuable information for advanced emergency management.
Our solution is to propose a novel remote vital sign detection drone system using mmWave radar technology. By leveraging the unique capabilities of mmWave radar, our drone system aims to provide accurate and resilient vital sign information especially in adverse conditions, such as low visibility or cluttered wild environments. The proposed methodology also demonstrates promising results in simulated search and rescue scenarios, indicating its potential for real-world deployment.
Vertical grid screening
Delivery drones typically perform delivery by suspending the parcel vertically or landing the drone to drop off the package. However, because of the constrained landing area and the requirement for precise navigation, delivering items to customers who reside in multi-story apartment complexes poses a unique challenge.
 This research proposes a novel drone delivery system for multi-story apartment buildings with balconies that employ two methods for Vertical Grid Screening (VGS):
This research proposes a novel drone delivery system for multi-story apartment buildings with balconies that employ two methods for Vertical Grid Screening (VGS):
- Grid Screening (GS)
- Square Screening (SS).
These screening methods will detect unique markers to identify the precise balcony that needs to receive the product.
The research paper also explores the scanning and trajectory methods required for autonomous flight to approach the marker location accurately. The proposed machine learning system is trained on a YOLOv5 model for image recognition of the marker, and four different models and batch sizes are compared.